福島に
集積する先端研究の拠点 ②
日本原子力研究開発機構(JAEA)で
研究されている廃炉技術の例
ロボットシミュレータ
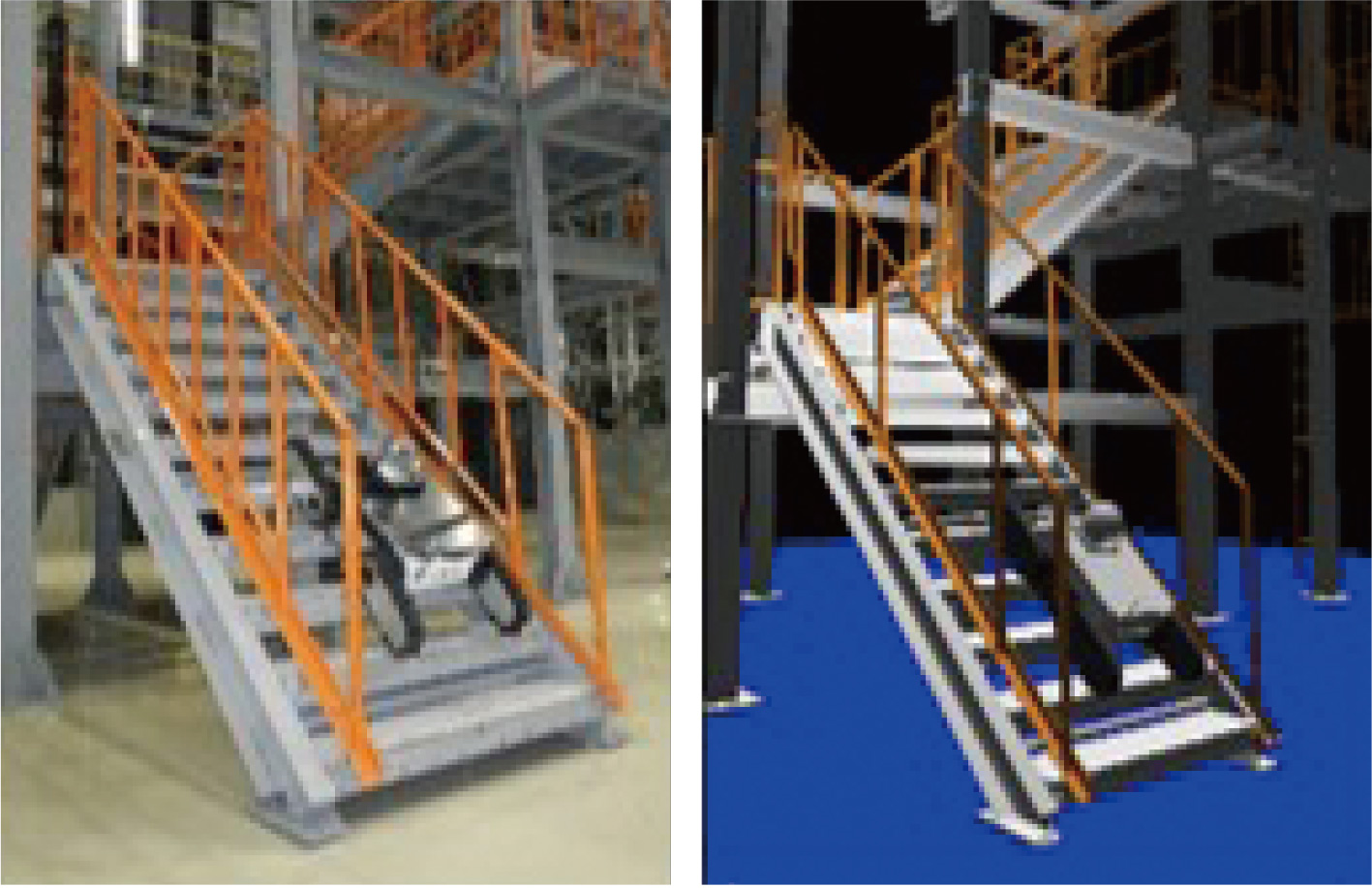
ロボットがモックアップ階段(*2)を走行する
実機試験の様子(左)とシミュレーションによる再現(右)
1Fの廃止措置では、高線量下での作業を伴うため、遠隔操作ロボットの活用が不可欠です。数値シミュレーション技術を活用して、ロボットの設計・検証やロボットの操縦訓練を効率的に行うため、Choreonoid(*1)をベースとしたロボットシミュレータを開発しています。
(*1)国立研究開発法人産業技術総合研究所が開発した動力学シミュレータ
(*2)階段の幅や傾斜を変更することで、1F原子炉建屋内の色々な階段を模擬できる試験設備。楢葉遠隔技術開発センターには、この他にもロボット試験用水槽やモーションキャプチャを備えています。
バーチャルリアリティ(VR)システム

福島第一原子力発電所の原子炉建屋内を仮想空間として再現(*3)し、廃炉に係る作業計画の事前確認や作業者の教育・訓練が可能です。また、ロボットシミュレータを応用することで、VRシステムによる建屋内での遠隔操作などの訓練も合わせて行うことができます。これにより作業環境、作業方法・手順等の理解促進が期待されます。
(*3)事故後の内部調査で取得したレーザースキャンデータなどを基に、1~3号機の1階及び地下階の構築物、空間放射線量率などを再現しています。
遠隔放射線計測

1広域な計測データを得るために様々な手法が開発されていますが、無人ヘリコプターもその内の1つです。無人ヘリコプターは1~100㎢の範囲での計測に適しています。さらに地形画像システムと組み合わせることで、森林や林間部で使用することができます。より広い範囲の計測には無人航空機が、逆に狭い範囲の詳細な計測にはマイクロUAV(ドローン)などが用いられ、原子炉建屋内などの空間放射線量率の測定技術を開発しています。
実規模実証試験設備(1/8セクター試験体)
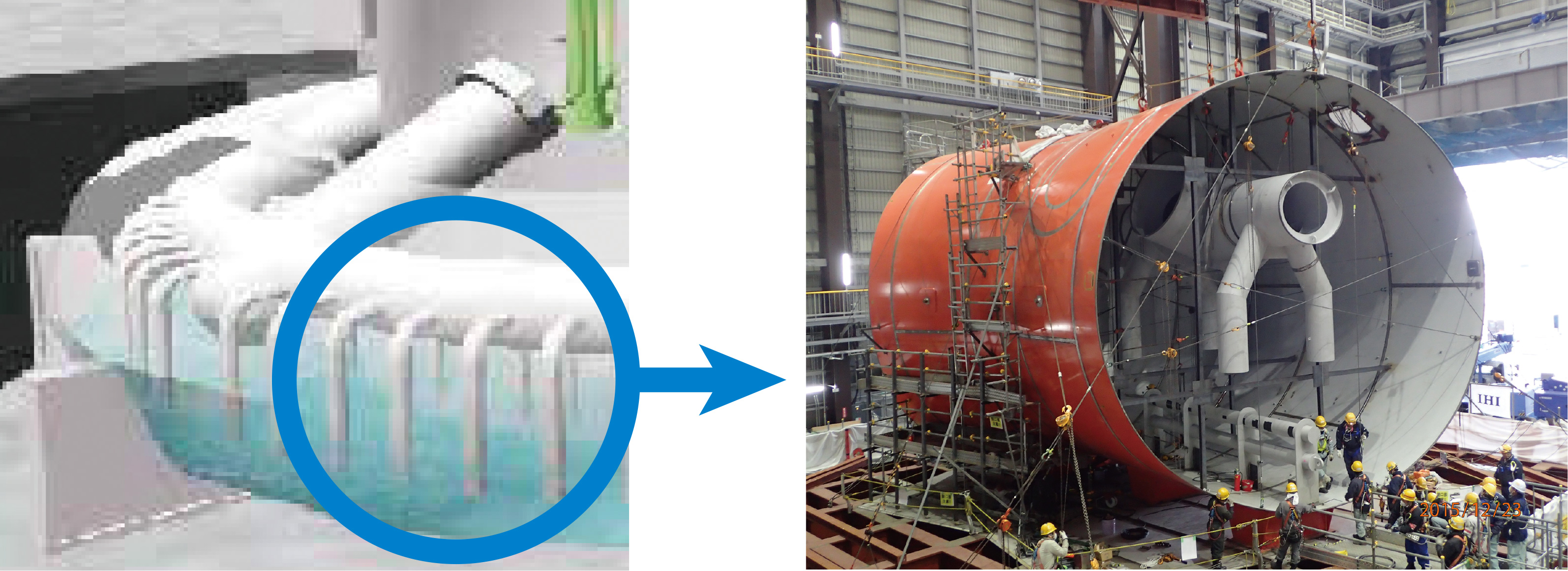
※写真・画:技術研究組合 国際廃炉研究開発機構(IRID)
福島イノベーション・コースト構想とは
例えば、ロボットテストフィールドは、今後、利用拡大が見込まれる無人航空機(ドローン)、陸上・災害ロボット、水上・水中ロボットの開発を加速する上で求められる実証試験・性能評価機能を兼ね備えた世界に類を見ない規模の実証拠点となる予定です。世界初の完全自律制御飛行のドローンによる長距離荷物配送の実証試験が実施されるなど、最先端のロボット技術開発が進展しています。
今後、拠点を整備するだけでなく、①浜通り地域の事業者と外部から進出してきた企業・大学等が連携し、新たな産業基盤を構築していく、②地元の大学や高専等の教育機関から輩出される人材が構想に関連する企業へ就職していくことを通じて、浜通り地域の産業再生へ向けた好循環を生み出していくべく、国は県等と緊密に連携して取り組んでいくこととしています。
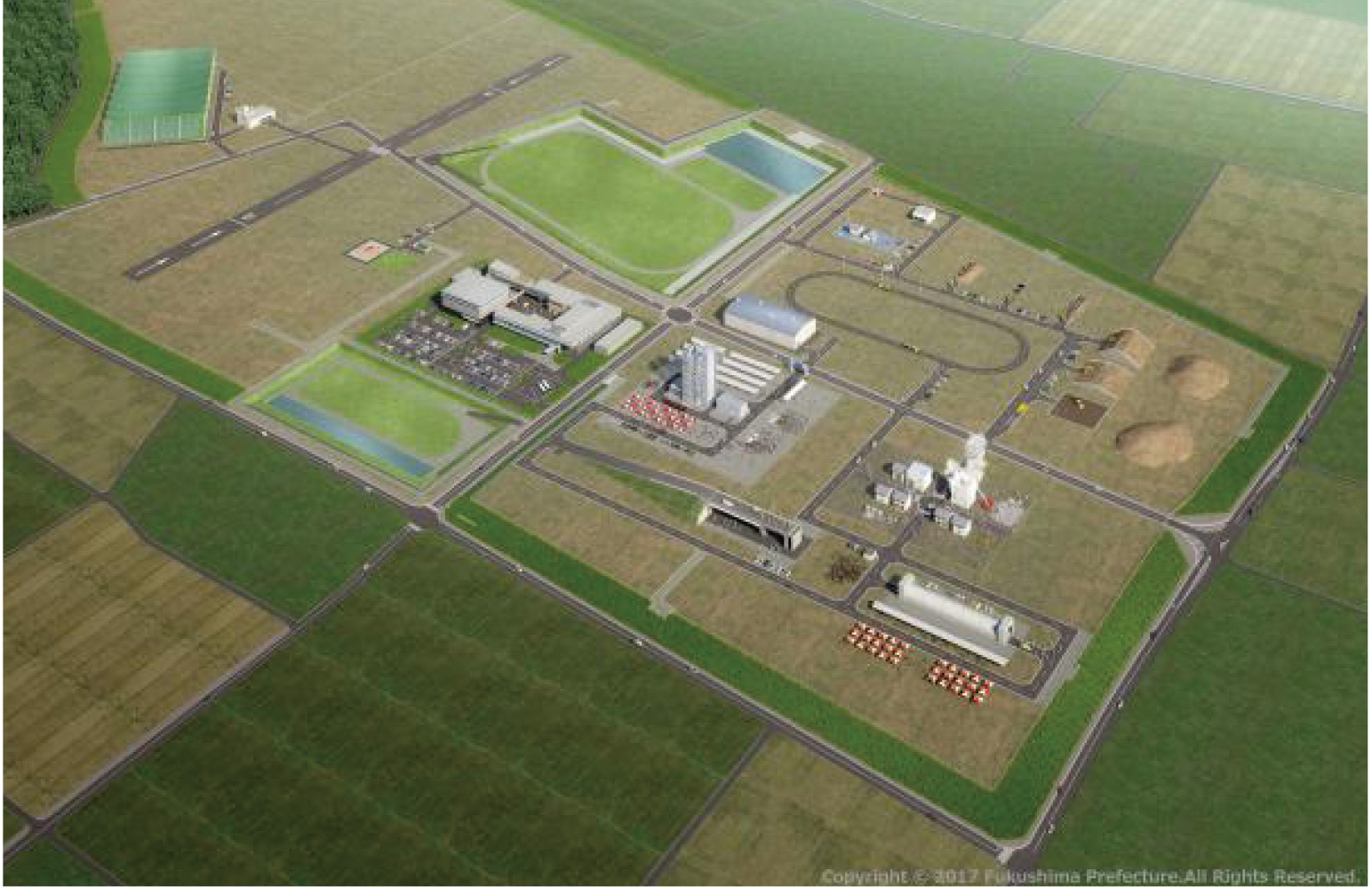
福島ロボットテストフィ-ルド完成予想図
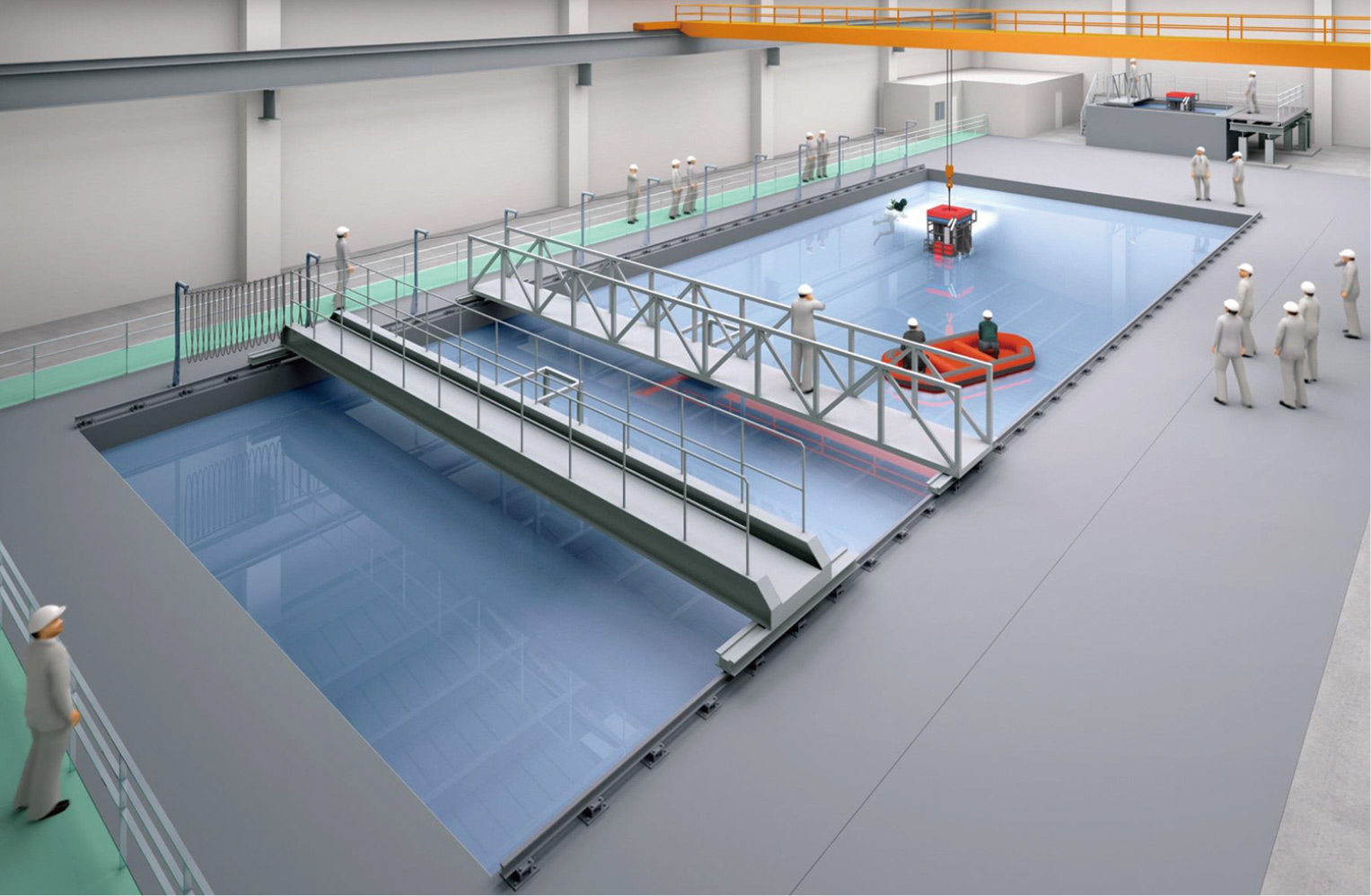
水中・水上ロボットエリア完成予想図

学生諸君の果敢なチャレンジに期待します

